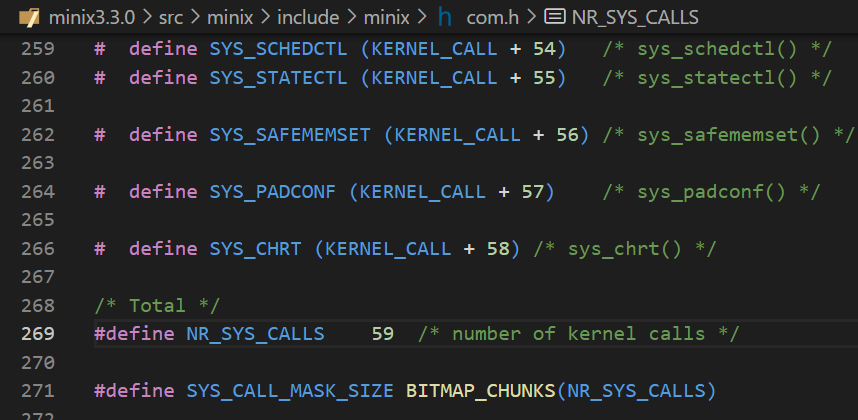
需要修改的文件
M 代表修改,C代表新建,D代表删除
/src/include/unistd.h(M) :提供对 POSIX 操作系统 API 的访问功能的头,添加系统调用chrt/src/minix/lib/libc/sys/chrt.c(C)-
/usr/src/minix/lib/libc/sys/Makefile.inc(M) /src/minix/servers/pm/proto.h(M)/src/minix/servers/pm/chrt.c(C)/src/minix/include/minix/callnr.h(M)/src/minix/servers/pm/Makefile(M)/src/minix/servers/pm/table.c(M) :定义进程属性相关的变量/src/minix/include/minix/syslib.h(M)/src/minix/lib/libsys/sys_chrt.c(C)-
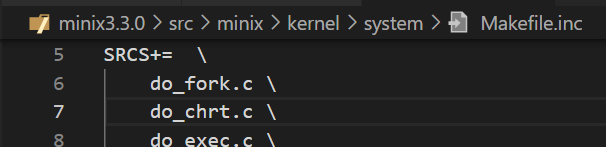
/src/minix/lib/libsys/Makefile(M) /src/minix/kernel/system.h(M)/src/minix/kernel/system/do_chrt.c(C)/src/minix/kernel/system/Makefile(M)/src/minix/include/minix/com.h(M) :定义在服务器和驱动程序设备间通信/src/minix/kernel/config.h(M) :内核版本收集不太可能更改的定义编号/src/minix/kernel/system.c(M)-
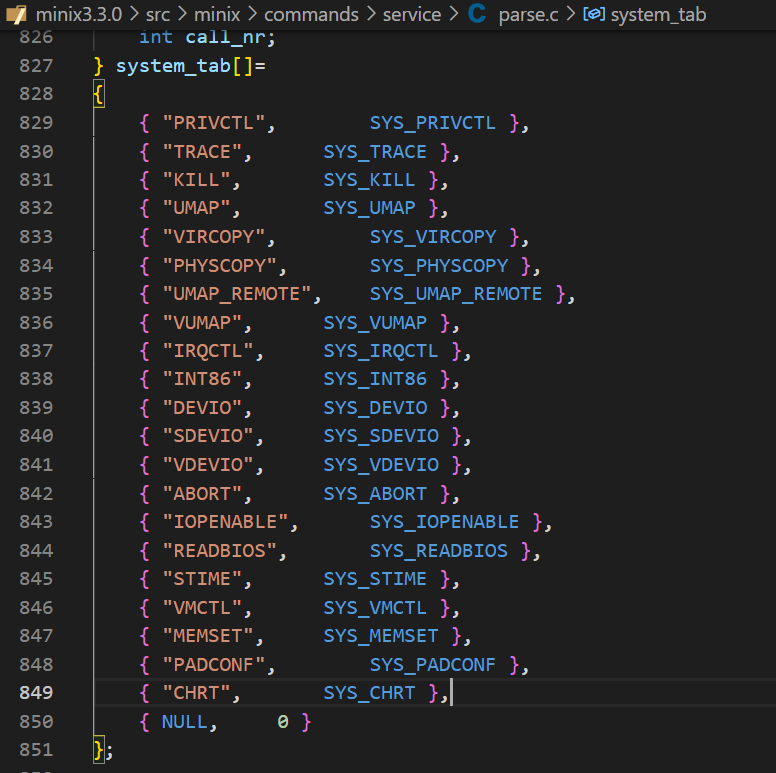
/src/minix/commands/service/parse.c(M) /src/minix/kernel/proc.h(M) :定义内核进程表/src/minix/kernel/proc.c(M)
应用层
首先,根据文档要求:
准备工作:先在 /src/include/unistd.h 与 /src/minix/lib/libc/sys/Makefiles.inc 中添加 int chrt(long) 与 chrt.c,并在 /src/minix/lib/libc/sys 中新增文件 chrt.c
随后,根据文档中对函数的说明与要求:
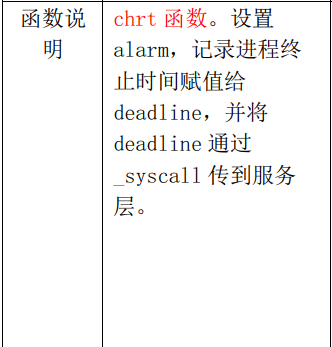
我们知道,函数 int chrt(long) 输入的参数 deadline 是指进程运行的时长,在此函数中,我们需要做的事情有三件:
- 设置
alarm - 将
deadline设置为进程的终止时间 - 通过
MINIX的IPC通信机制(通过message结构体来传输信息),将deadline传到服务层
按照这个步骤来写 chrt 函数,我们首先需要知道 alarm 的工作原理与调用方法(见《UNIX环境高级编程》10.10):
#include <unistd.h>
unsigned int alarm(unsigned int seconds);
当调用这个函数开始,可以设置一个定时器,持续 seconds 秒,当超过这个时间时,产生一个 SIGALRM 信号,若忽略或不捕捉这个信号,则默认动作是终止调用 alarm 函数的进程。
而这里 seconds 的类型是 unsigned int ,deadline 类型却是 long,为防止一些类型不匹配而可能带来的错误,我们在一开始就应当对 deadline 的大小进行判断,于是得到代码如下:
/* int chrt(long); */
int chrt(long deadline){
if(deadline <= 0)
return 0; /* syscall error */
alarm((unsigned int)deadline);
return 1;
}
接下来进行第二步,若想知道进程的实际终止时间,显然,我们必须要得到当前时间,这里用 t 来表示。
我们可以通过系统调用 clock_getttime ( 同目录下的\src\minix\lib\libc\sys\clock_gettime.c)来获得系统的当前时间,并将其加上 deadline 即可得到进程实际的终止时间。
阅读 \src\minix\lib\libc\sys\clock_gettime.c 的源码:
int clock_gettime(clockid_t clock_id, struct timespec *res)
{
message m;
memset(&m, 0, sizeof(m));
m.m_lc_pm_time.clk_id = clock_id;
if (_syscall(PM_PROC_NR, PM_CLOCK_GETTIME, &m) < 0)
return -1;
res->tv_sec = m.m_pm_lc_time.sec;
res->tv_nsec = m.m_pm_lc_time.nsec;
return 0;
}
显然,我们需要找到 timespec 的定义,经过一番查找,发现他在\src\sys\sys\time.h 中,定义描述为:
/*
* Structure defined by POSIX.1b to be like a timeval.
*/
struct timespec {
time_t tv_sec; /* seconds */
long tv_nsec; /* and nanoseconds */
};
那么回去看 clock_gettime 就能大概明白一些内容,当然还是会有一些不太明白,比如参数 clock_id 的含义,在《UNIX环境高级编程》 P687可以找到定义:
- CLOCK_REALTIME:系统实时时间,随系统实时时间改变而改变,即从UTC 1970-1-1 0:0:0开始计时,中间时刻如果系统时间被用户改成其他,则对应的时间相应改变。
- CLOCK_MONOTONIC:从系统启动这一刻起开始计时,不受系统时间被用户改变的影响。
- CLOCK_PROCESS_CPUTIME_ID:本进程到当前代码系统CPU花费的时间。
- CLOCK_THREAD_CPUTIME_ID:本线程到当前代码系统CPU花费的时间
可以看看 wiki 来了解这些参数的意义。
由于参数 deadline 表示的是秒,于是我们只需要这里的成员变量 tv_sec,那么可得到代码如下:
/* int chrt(long); */
int chrt(long deadline){
/* other code omitted */
struct timespec t;
clock_gettime(CLOCK_MONOTONIC, &t);
deadline = t.tv_sec + deadline;
}
最后,我们只需要将 deadline 通过信息传递到服务层即可,源码可以发现都使用了 message 这一数据类型,寻找 message 类型的定义:
\src\minix\include\minix\ipc.h
由于定义太长,就不贴出来了。我们知道,现在的 deadline 已经变为表示进程实际结束的时间了,于是我们只需要使 message 中的某个成员等于 deadline,再通过 _syscall() 传递信息即可。
可以在MINIX的wiki上找到关于Message结构体的一些描述,也可以自己硬看(wiki上也有message定义的文件的地址)。这里选择联合体中的一个成员来传递deadline ,为了防止由于类型转换带来的一些可能的问题(一直在说的),最好找类型也是 long 的成员,并且必须在 mess_1 ~mess_10中寻找(后续带有名字的可能有其他作用)。
可以选mess_2,mess_4,mess_10,综合后续还需要传递 endpoint 类型的数据,这里选择mess_2中的m2l1/m2l2。通过2263行开始的宏定义,我们可以简写为m2_l1/m2_l2,于是,代码如下:
/* int chrt(long); */
int chrt(long deadline){
/* other code omitted */
message m;
memset(m, 0, sizeof(m));
m.m2_l1 = deadline;
return _syscall(PM_PROC_NR, PM_CHRT, &m);
}
自此,应用层的 chrt 函数就已经结束,仿照源码的代码风格,我们修改后如下:
#include <sys/cdefs.h>
#include "namespace.h"
#include <lib.h>
#include <string.h>
#include <unistd.h>
#include <sys/time.h>
// #ifdef __weak_alias
// __weak_alias(chrt, _chrt)
// #endif
int chrt(long deadline) {
message m;
memset(&m, 0, sizeof(m));
if (deadline <= 0)
return 0;
alarm((unsigned int)deadline);
struct timespec t;
clock_gettime(CLOCK_MONOTONIC, &t);
deadline = t.tv_sec + deadline;
m.m2_l1 = deadline;
return _syscall(PM_PROC_NR, PM_CHRT, &m);
}
服务层
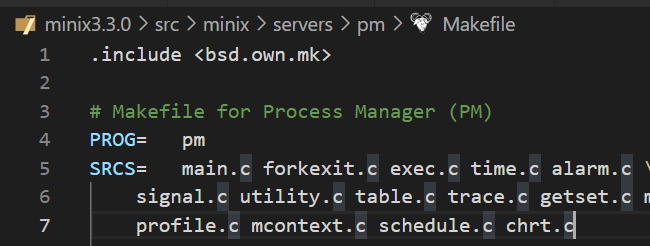
首先根据文档,修改文件:
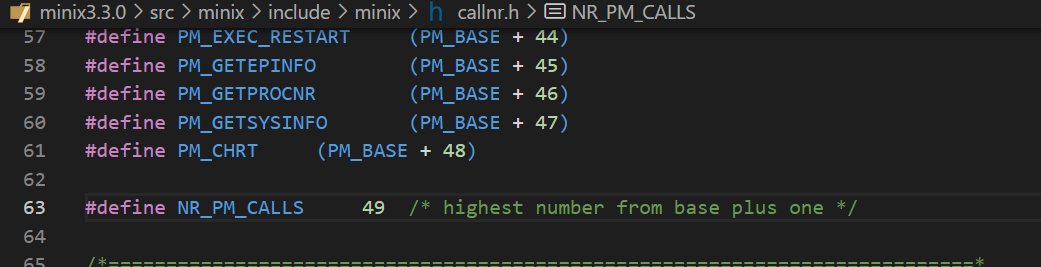
添加定义 int do_chrt(void);、 #define PM_CHRT (PM_BASE + 48) 、chrt.c

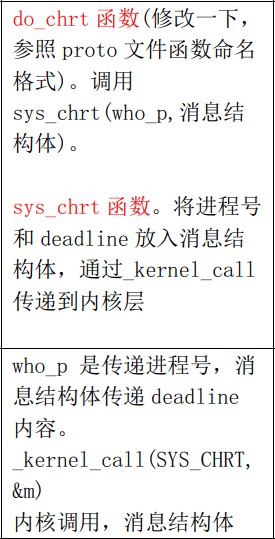
根据文档说明,添加函数实现:
我们可以在同目录下的 glo.h 文件中找到关于 who_p等类型的定义:
/* The parameters of the call are kept here. */
EXTERN message m_in; /* the incoming message itself is kept here. */
EXTERN int who_p, who_e; /* caller's proc number, endpoint */
EXTERN int call_nr; /* system call number */
由于sys_chrt需要参数deadline,而我们在应用层中将 deadline 放进了 m2_l1中,于是:
#include "pm.h"
#include <signal.h>
#include <sys/time.h>
#include <minix/com.h>
#include <minix/callnr.h>
#include "mproc.h"
int do_chrt(void){
sys_chrt(who_p, m_in.m2_l1);
return OK;
}
(用OK的原因是因为此目录下其他的.c文件都是这样return的…..)
然后开始对着步骤改文件

sys_chrt.c代码如下:
#include "syslib.h"
int sys_chrt(proc_ep, deadline)
endpoint_t proc_ep;
long deadline;
{
message m;
int r;
m.m2_i1 = proc_ep;
m.m2_l1 = deadline;
r = _kernel_call(SYS_CHRT, &m);
return r;
}
这里使用 m2_i1 是因为 endpoint_t 类型是4字节的数,这在 Message Wiki中详细介绍了,因此这里可以使用int类型的m2_i1来记录此变量
事实上我认为,应该选用unsigned int类型来记录,可惜没有这样的成员,但在MINIX里存在int与unsigned int共用域的情况
内核层
先把要改要加的东西弄完
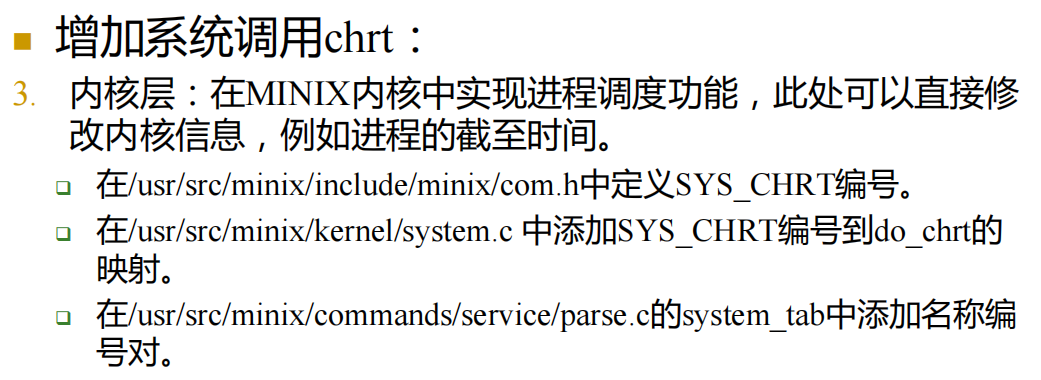
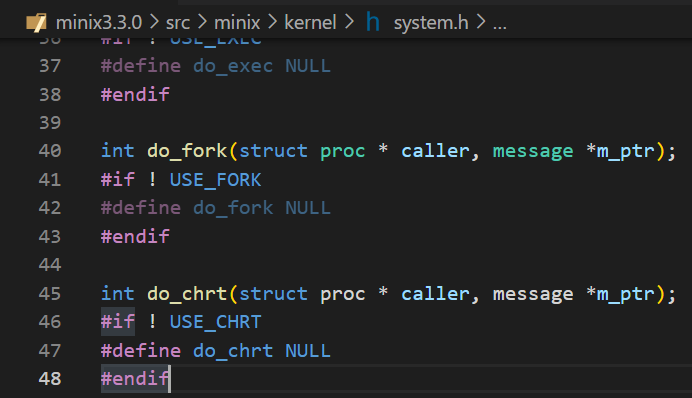
需要注意的是,由system.h和do_fork.c中的IF USE_CHRT和IF USE_FORK知,应在某一.h文件中定义该条目,在同目录下找寻发现,我们还需要在 config.h 文件中定义 USE_CHRT 为1

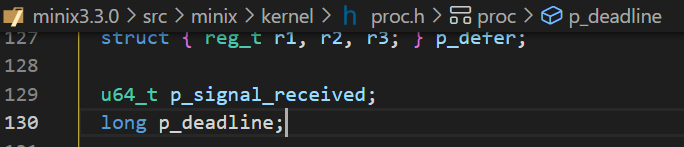
修改完后,根据文档说明编写do_chrt函数:
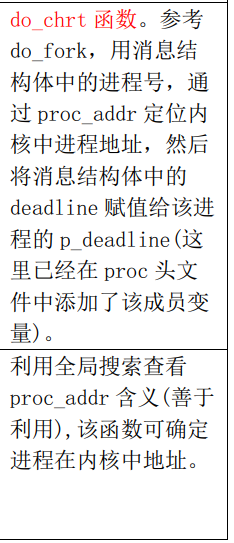
由于我们的参数中含有struct proc,因此我们还需要去阅读 proc.h 中关于 proc 的定义,可以在 proc.h 中找到 proc_addr的的定义,根据文档说明,do_chrt.c文件如下:
#include "kernel/system.h"
#include "kernel/vm.h"
#include <signal.h>
#include <string.h>
#include <assert.h>
#include <minix/endpoint.h>
#include <minix/u64.h>
#if USE_CHRT
/*===========================================================================*
* do_chrt *
*===========================================================================*/
int do_chrt(struct proc* caller, message* m_ptr) {
struct proc* p;
p = proc_addr(m_ptr->m2_i1);
p->deadline = m_ptr->m2_l1;
return OK;
}
#endif /* USE_CHRT */
进程调度
根据文档,我们需要修改几个函数,进而修改判断进程优先级的判定法则:
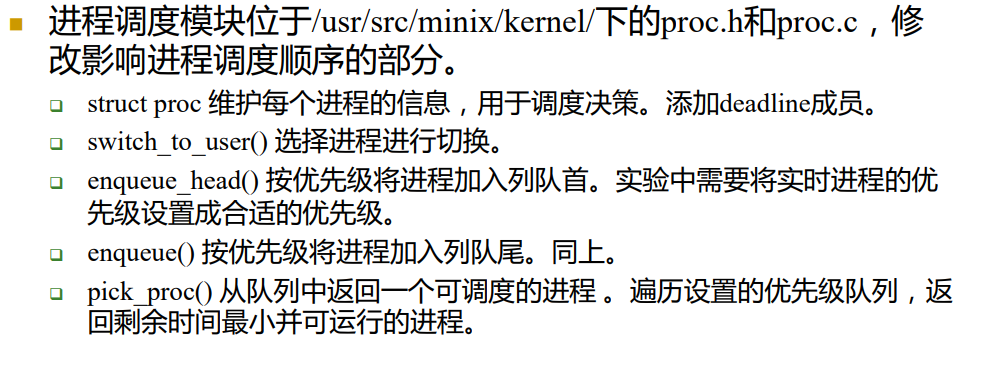
优先级的判定为:最早deadline的用户进程相对于其它用户进程具有更高的优先级,从而被优先调度运行。
可以发现在 proc.h 中可以找到成员 ` char p_priority; 用于记录优先级,在 \src\minix\include\minix\config.h`中可以找到最高优先级为0,于是,我们便可以开始修改一些函数
首先,进入函数 switch_to_user(),阅读注释可以很好的理解代码
先更改 enqueue_head() 中关于优先级的定义,阅读注释,可知rp为正在运行的进程,需将其按照优先级加入队列
于是我们将所有deadline > 0的进程优先级全部设为5(经尝试,优先级为01234时无法正确实现进程调度,推测应为属于内核层的进程的优先级,经过后续书本的学习,发现分别为内核层驱动层服务层进程)
if (rp->deadline > 0)
rp->p_priority = 5;
const int q = rp->p_priority; /* scheduling queue to use */
随后更改 enqueue() 中关于优先级的定义,与上面的做法相同
最后更改pick_proc()中对于相同优先级下进程的选择,由于设置了deadline的进程优先级都为5,这些进程组成了一个列表,这里通过proc.h中可以看出来:
struct proc* p_nextready; /* pointer to next ready process */
于是我们通过遍历优先级为5的进程组成的列表,选择出设置了deadline并且deadline的值最小的进程,过程中需要对这些进程进行判断是否可运行(proc_is_runnable()),最后返回这个选择的进程
for (q=0; q < NR_SCHED_QUEUES; q++) {
if(!(rp = rdy_head[q])) {
TRACE(VF_PICKPROC, printf("cpu %d queue %d empty\n", cpuid, q););
continue;
}
assert(proc_is_runnable(rp));
struct proc* t;
if (q == 5) {
t = rp->p_nextready;
while(t){
if (t->p_deadline > 0 &&
(!rp->p_deadline || t->p_deadline < rp->p_deadline))
if (proc_is_runnable(t))
rp = t;
t = t->p_nextready;
}
}
if (priv(rp)->s_flags & BILLABLE)
get_cpulocal_var(bill_ptr) = rp; /* bill for system time */
return rp;
}